Loading...
Searching...
No Matches
Rotation.h File Reference
回転・クォータニオン ライブラリ ヘッダ More...
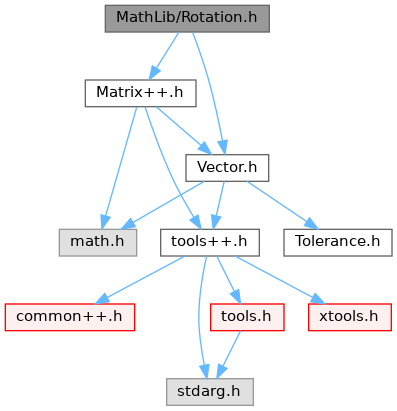
Include dependency graph for Rotation.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | Quaternion< T > |
Namespaces | |
| namespace | jbxl |
Macros | |
| #define | Quaternion2RotMatrix(q) (q).getRotMatrix() |
| #define | VectorRotate(v, q) VectorRotation((v),(q)) |
| #define | VectorInvRotate(v, q) VectorInvRotation((v), (q)) |
Functions | |
| template<typename T > | |
| Vector< T > | Quaternion2ExtEulerXYZ (Quaternion< T > qut, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | Quaternion2ExtEulerZYX (Quaternion< T > qut, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | Quaternion2ExtEulerXZY (Quaternion< T > qut, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | Quaternion2ExtEulerYZX (Quaternion< T > qut, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | Quaternion2ExtEulerYXZ (Quaternion< T > qut, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | Quaternion2ExtEulerZXY (Quaternion< T > qut, Vector< T > *vct=NULL) |
| template<typename T > | |
| bool | operator== (const Quaternion< T > q1, const Quaternion< T > q2) |
| template<typename T > | |
| bool | operator!= (const Quaternion< T > q1, const Quaternion< T > q2) |
| ~ 共役 | |
| template<typename T > | |
| Quaternion< T > | operator~ (const Quaternion< T > a) |
| template<typename T > | |
| Quaternion< T > | operator- (const Quaternion< T > a) |
| template<typename T > | |
| Quaternion< T > | operator+ (const Quaternion< T > a, const Quaternion< T > b) |
| template<typename T > | |
| Quaternion< T > | operator- (const Quaternion< T > a, const Quaternion< T > b) |
| template<typename T , typename R > | |
| Quaternion< T > | operator* (const R d, const Quaternion< T > a) |
| template<typename T , typename R > | |
| Quaternion< T > | operator* (const Quaternion< T > a, const R d) |
| template<typename T , typename R > | |
| Quaternion< T > | operator/ (const Quaternion< T > a, const R d) |
| template<typename T > | |
| Quaternion< T > | operator* (const Quaternion< T > a, const Quaternion< T > b) |
| template<typename T > | |
| Quaternion< T > | operator* (const Quaternion< T > q, const Vector< T > v) |
| template<typename T > | |
| Quaternion< T > | operator* (const Vector< T > v, const Quaternion< T > q) |
| template<typename T > | |
| Quaternion< T > | ExtEulerXYZ2Quaternion (Vector< T > e) |
| template<typename T > | |
| Quaternion< T > | ExtEulerZYX2Quaternion (Vector< T > e) |
| template<typename T > | |
| Quaternion< T > | ExtEulerXZY2Quaternion (Vector< T > e) |
| template<typename T > | |
| Quaternion< T > | ExtEulerYZX2Quaternion (Vector< T > e) |
| template<typename T > | |
| Quaternion< T > | ExtEulerYXZ2Quaternion (Vector< T > e) |
| template<typename T > | |
| Quaternion< T > | ExtEulerZXY2Quaternion (Vector< T > e) |
| template<typename T > | |
| Matrix< T > | ExtEulerXYZ2RotMatrix (Vector< T > eul) |
| template<typename T > | |
| Matrix< T > | ExtEulerZYX2RotMatrix (Vector< T > eul) |
| template<typename T > | |
| Matrix< T > | ExtEulerXZY2RotMatrix (Vector< T > eul) |
| template<typename T > | |
| Matrix< T > | ExtEulerYZX2RotMatrix (Vector< T > eul) |
| template<typename T > | |
| Matrix< T > | ExtEulerZXY2RotMatrix (Vector< T > eul) |
| template<typename T > | |
| Matrix< T > | ExtEulerYXZ2RotMatrix (Vector< T > eul) |
| template<typename T > | |
| Vector< T > | RotMatrixElements2ExtEulerXYZ (T m11, T m12, T m13, T m21, T m31, T m32, T m33, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrixElements2ExtEulerZYX (T m11, T m12, T m13, T m21, T m23, T m31, T m33, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrixElements2ExtEulerXZY (T m11, T m12, T m13, T m21, T m22, T m23, T m31, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrixElements2ExtEulerYZX (T m11, T m12, T m13, T m21, T m22, T m31, T m32, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrixElements2ExtEulerYXZ (T m12, T m21, T m22, T m23, T m31, T m32, T m33, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrixElements2ExtEulerZXY (T m12, T m13, T m21, T m22, T m23, T m32, T m33, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrix2ExtEulerXYZ (Matrix< T > mtx, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrix2ExtEulerZYX (Matrix< T > mtx, Vector< T > *vct) |
| template<typename T > | |
| Vector< T > | RotMatrix2ExtEulerXZY (Matrix< T > mtx, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrix2ExtEulerYZX (Matrix< T > mtx, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrix2ExtEulerYXZ (Matrix< T > mtx, Vector< T > *vct=NULL) |
| template<typename T > | |
| Vector< T > | RotMatrix2ExtEulerZXY (Matrix< T > mtx, Vector< T > *vct=NULL) |
| template<typename T > | |
| Quaternion< T > | RotMatrix2Quaternion (Matrix< T > mtx) |
| template<typename T > | |
| Vector< T > | VectorRotation (Vector< T > v, Quaternion< T > q) |
| template<typename T > | |
| Vector< T > | VectorInvRotation (Vector< T > v, Quaternion< T > q) |
| template<typename T > | |
| T * | VectorRotation (T *v, Quaternion< T > q) |
| template<typename T > | |
| T * | VectorInvRotation (T *v, Quaternion< T > q) |
| template<typename T > | |
| Quaternion< T > | V2VQuaternion (Vector< T > a, Vector< T > b) |
| template<typename T > | |
| Quaternion< T > | PPPQuaternion (Vector< T > a, Vector< T > b, Vector< T > c) |
| template<typename T > | |
| Quaternion< T > | VPPQuaternion (Vector< T > a, Vector< T > b, Vector< T > c) |
| template<typename T > | |
| Quaternion< T > | PPVQuaternion (Vector< T > a, Vector< T > b, Vector< T > c) |
| template<typename T > | |
| Quaternion< T > | SlerpQuaternion (Quaternion< T > qa, Quaternion< T > qb, T t) |
Variables | |
| template<typename T > | |
| class DllExport | Quaternion |
Detailed Description
Definition in file Rotation.h.
Macro Definition Documentation
◆ Quaternion2RotMatrix
| #define Quaternion2RotMatrix | ( | q | ) | (q).getRotMatrix() |
Definition at line 232 of file Rotation.h.
◆ VectorInvRotate
| #define VectorInvRotate | ( | v, | |
| q ) VectorInvRotation((v), (q)) |
Definition at line 254 of file Rotation.h.
◆ VectorRotate
| #define VectorRotate | ( | v, | |
| q ) VectorRotation((v),(q)) |
Definition at line 253 of file Rotation.h.